-
Pont Transbordeur et ARDUINO
Commande de mon transbordeur avec un ARDUINO et télécommande infrarouge
Je vais vous expliquer comment j’ai fait cette réalisation. Cela va être un peu long, alors si vous le préférez prière de me joindre par mail et je vous transmettrais un document très complet.
ETAPE 1 :
La commande actuelle de mon transbordeur est assurée soit par ma centrale station soit par l'intermédiaire de mon Keyboard.
Voici comment cela fonctionne actuellement.
Je dispose de 4 touches repérées sur la photo de 1 à 4.

Les touches 1 et 2 permettent de sélectionner le sens du déplacement. La touche 3 commande l'ordre de mise en mouvement du pont.
La touche 4 commande l'arrêt du pont. Mais cet arrêt est un peu particulier. En effet, le pont s'arrête à la prochaine voie que le pont rencontre.
Voici maintenant mon projet :
Le pont dispose de 9 voies que je vais numéroter de 0 à 8

La voie 0 est la voie d'arrivée mais est aussi une voie de stockage.
A l'aide d'une télécommande infra rouge basique (coût faible), je souhaite pouvoir commander la destination finale souhaitée (par exemple aller de n'importe quelle voie [sauf la voie de départ] à la voie 4 en appuyant sur la touche 4 de la télécommande).
A la mise sous tension de mon installation complète, le pont est toujours arrêté en face d'une voie
Cela impose une modification sur ce pont transbordeur : Détecter la position du pont quand il est en face d'une voie.
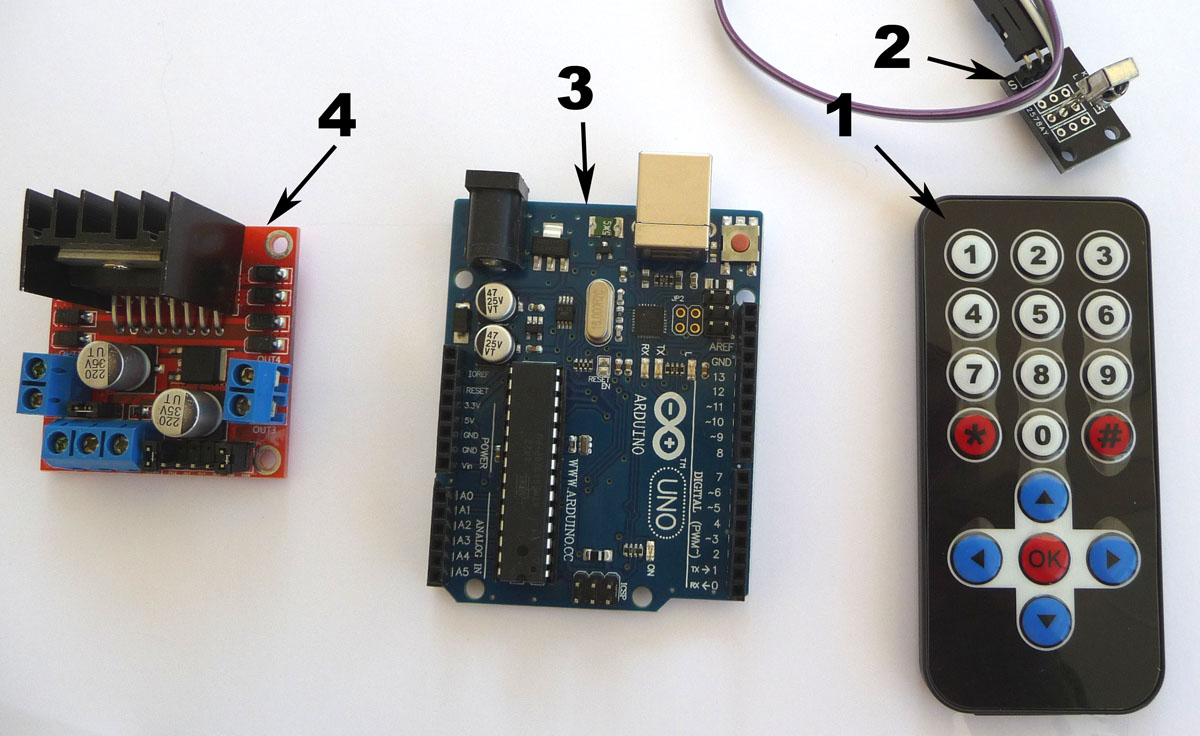
Pour finir voici le matériel que je vais utiliser :

- Une télécommande infra rouge et son capteur : Repère 1 et 2
- Un ARDUINO UNO : repère 3
- Un pont en H pour commander le moteur dans les deux sens : Repère 4
ETAPE 2 :
Démontage du pont transbordeur et identification du câblage actuel. Ce démontage a déjà été fait et est décrit dans mon blog à la rubrique "adaptation/ modification".
Voici tout d'abord la partie mobile (certes modifiée lors de la remotorisation) :
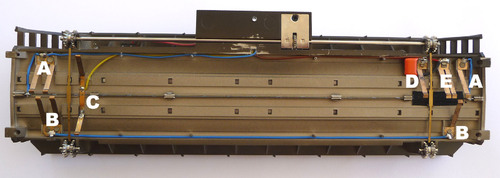
Ensuite la partie fixe du pont :

Avec les repères sur ces photos voici le schéma qui explique le fonctionnement du pont avec la commande actuelle.

Compte tenu des nouveaux composants voici le futur schéma.

ETAPE 3 : Programmation de l'ARDUINO
Caractéristique de l’Arduino UNO que je vais utiliser :
- 14 broches numériques d'entrées/sorties (dont 6 peuvent être utilisées en sorties PWM (largeur d'impulsion modulée)),
- 6 entrées analogiques (qui peuvent également être utilisées en broches entrées/sorties numériques),
Besoin théorique pour le projet :
· 1 entrée pour le récepteur Infra Rouge,
· 9 entrées pour détecter la position du pont,
· 1 sortie PWN : pour régler la vitesse du moteur.
· 2 sorties numériques : pour commander le sens de rotation.
Soit 13 E/S sur les 20 disponibles
Amélioration toute suite envisagée :
J'ai mis un bâtiment genre "poste d'aiguillage" et à l'intérieur j'ai pensé mettre un pupitre avec des micros leds qui indiqueront la position du pont et son sens de déplacement.

Il est alors nécessaire d’utiliser :· - 2 sorties pour les leds pour le sens de déplacement,
· - 9 sorties pour les leds qui indiqueront la position du pont.
L'UNO sera donc occupé à 24 E/S pour 20 E/S disponibles. Il faut donc revoir tout de suite comment régler le problème !
Première solution prendre un Arduino plus « gros » : Carte MEGA 2560 R3
Deuxième solution : Faire la détection de la position du pont en utilisant une entrée analogique de l’UNO.
Dans ce cas cela supprime les 9 entrées de détection de la position du pont.
L’UNO sera occupé de la façon suivante :
· 1 entrée pour le récepteur Infra Rouge,
· 1 entrée analogique pour détecter la position du pont,
· 1 sortie PWN : pour régler la vitesse du moteur.
· 3 sorties numériques : pour commander le moteur (dont 2 pour le sens de rotation).
· 2 sorties pour les leds pour le sens de déplacement,
· 9 sorties pour les leds qui indiqueront la position du pont.
Soit 17 E/S sur les 20 possibles.
Afin de ne pas surcharger cette partie, je vous invite à télécharger comment je vais utiliser une entrée analogique pour détecter 9 positions de mon pont transbordeur : lien ICI.
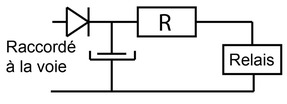
Voici le schéma de principe de la détection :

Les relais qui détecteront la position du pont sont alimentés de la façon suivante :
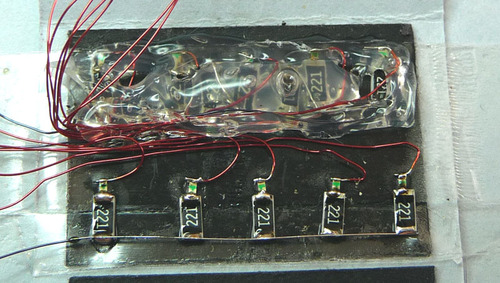
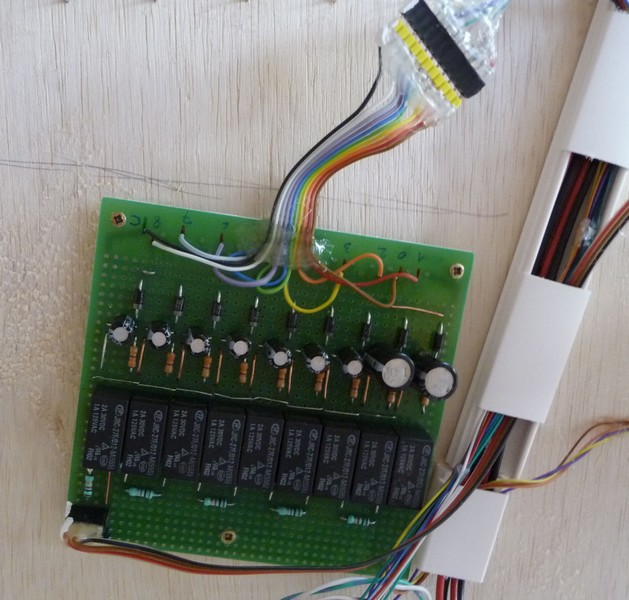
J’ai donc réalisé sur un circuit imprimé à bande, le câblage de 9 relais en y incluant les 10 résistances pour gérer la tension aux bornes de l’entrée analogique.

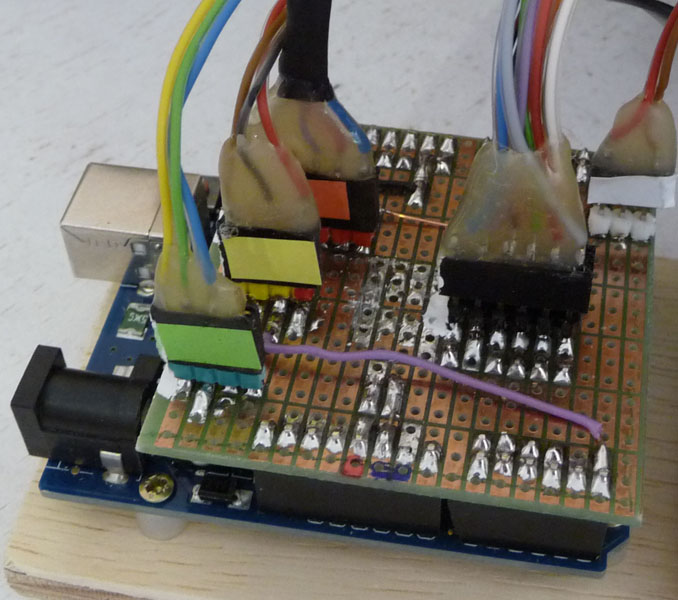
Afin de faciliter le raccordement de l'Arduino avec les différents éléments sur mon circuit j'ai réalisé une carte interface

Cette carte est réalisée avec une carte comportant des bandes cuivrées sur époxy. Ces bandes sont interrompues tous les trois trous.- Connecteur noir : Leds pupitres
- Connecteur Vert : Capteur Infrarouge
- Connecteur Jaune : Liaison avec la carte analogique
- Connecteur Rouge : Alimentation 5V et avec pont en H
- Connecteur blanc : Commande du relais K2.
Ces connecteurs sont un peu difficiles à souder car la partie isolante gêne un peu pour effectuer la soudure.
Pour cela il ne faut pas que la partie isolante soit "collée" à la partie cuivre du circuit.
Le câblage s'effectuant aussi bien du coté cuivre que du coté isolant pour une question de commodité.
Parfois il est impératif d'utiliser des conducteurs isolés quand ceux-ci passent au dessus d'autres conducteurs.
Pour s'assurer d'avoir un arrêt de qualité en face de la voie de destination, j'ai réutilisé la méthode Märklin. En effet l'arrêt est obtenu par des parties isolantes situées légèrement plus haut que le fil conducteur. Cela soulève le contact glissant qui coupe l'alimentation du moteur. Comme il y a très peu d'inertie cela provoque l'arrêt en face de la voie.

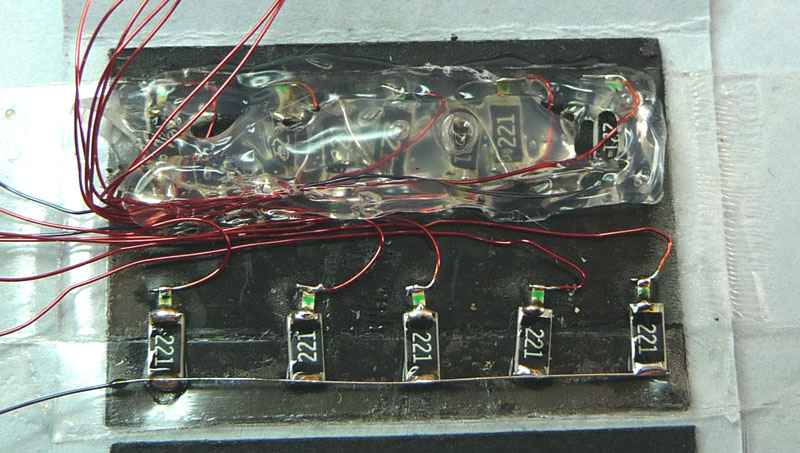
J'ai réalisé le pupitre qui va aller dans le poste de "triage" (en découpe de carton) et mis en place les différentes leds. Celles-ci sont maintenues par un adhésif double face pour effectuer leurs raccordements plus facilement. La résistance de limitation est soudée à la led.
Après chaque soudure la led est testée.
Chaque position sera indiquée sur le pupitre ainsi que les 2 sens de déplacement.
Le fonctionnement souhaité sera le suivant :
Quand une touche sera actionnée (qui va donc demander un déplacement) :
-1 : la led de destination clignotera
-2 : la led du sens de déplacement s'allumera.
Cela va permettre de voir si la touche actionnée donne bien l'ordre.
Quand le pont sera en position, seule la led de destination sera allumée en fixe.
Pour finir voici une vidéo qui explique le projet et sa réalisation : https://vimeo.com/135556465
Vous avez des interrogations, des questions n'hésitez pas à me contacter, je ferais en sorte de vous répondre le plus rapidement possible.
Arduinotement vôtre
 Tags : ardino, pont transbordeur, märklin
Tags : ardino, pont transbordeur, märklin
-
Commentaires










|
|
|
|
Superbe réalisation à étudier pour une adaptation en N. Le travail est déjà mâché par toutes ces explications et par la vidéo.
Merci pour ce tuto bien fait.
Jean-Claude